AUTinyDane
AUTinyDane: Small Robotic Dog Development Project
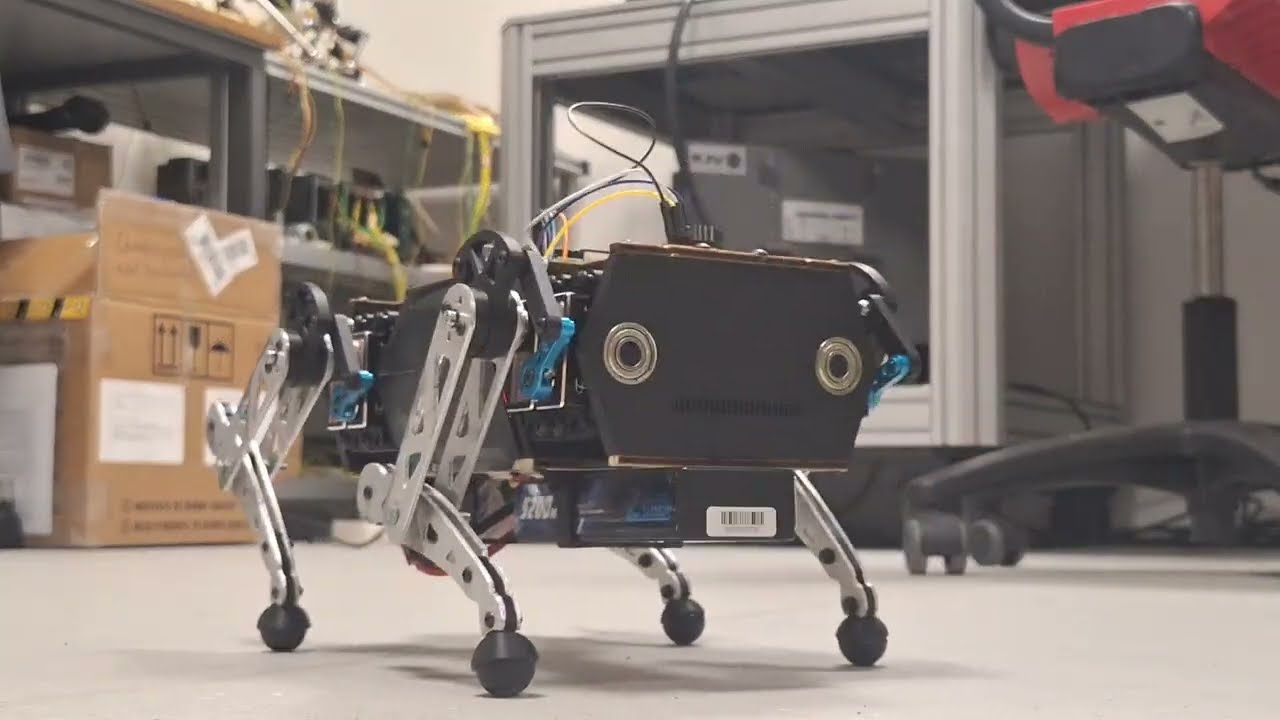
An open-source, affordable, and customizable 4-legged robotic dog. Originally developed as a 5th-semester project at the Department of Mechanical and Production Engineering at Aarhus University, this project covers the full development process from conceptual design to a finalized, functional quadruped. Click the image below to see the robot walking:
System Overview
AUTinyDane is designed to be highly accessible, operating on a unified, single-board architecture that handles all high-level planning and low-level execution in an open-loop configuration.
Hardware Architecture
The robot operates entirely on a single-controller setup:
- Main Controller: Raspberry Pi running the full Python-based control stack.
- Actuators: Csl6336hv servos utilizing a unique custom bevel gear transmission.
- Chassis: Hybrid construction utilizing laser-cut plywood and 3D-printed PLA/PETG components, validated through Finite Element Analysis (FEA) for structural integrity.
Software Architecture
The pure Python software stack manages everything from user inputs to gait generation and hardware interfacing:
- Kinematics: Inverse Kinematics engine calculated entirely in Python (
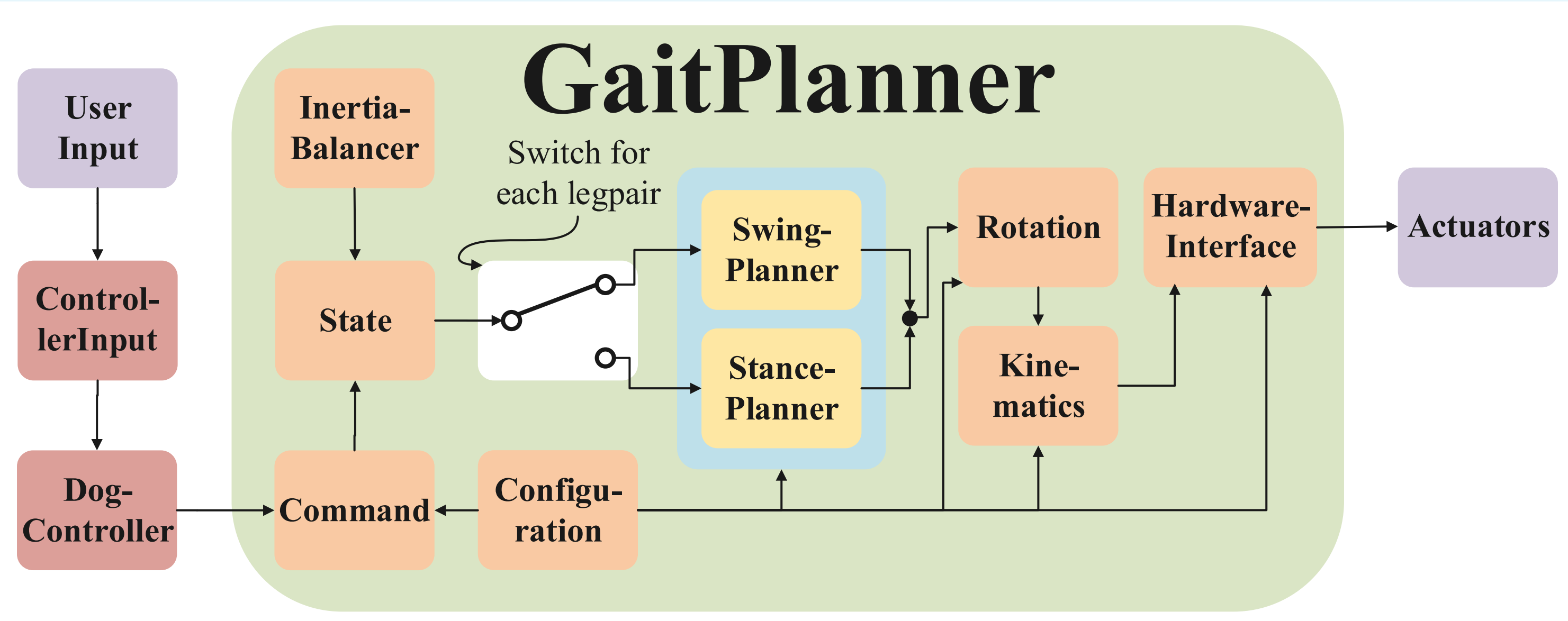
Kinematics.py). Optimal leg dimensions were mapped using an analytical solution. - Gait & Trajectory Planning: Modular planners for different movement phases operating in an open-loop state machine (
GaitPlannerV2.py,StancePlannerV2.py,SwingPlannerV2.py). - Hardware Interfacing: Direct communication protocols for servo control (
HardwareInterface.py). - Teleoperation: Native PlayStation 4 controller support for real-time directional input and gait switching.
Project Structure (Important Files)
AUTinyDane/
├── src/ # Core robot operational code
│ ├── Kinematics.py # Inverse kinematics calculations
│ ├── HardwareInterface.py# Serial/I2C communication to Servos
│ ├── Configuration.py # Physical dimensions and robot parameters
│ └── PS4Controller/ # DualShock 4 input mapping
├── legacy/ # Original planning modules
│ ├── GaitPlanner.py # Locomotion state machine and timing
│ ├── StancePlanner.py # Stance phase calculations
│ ├── SwingPlanner.py # Foot swing trajectory generation
│ └── gait_simulator.py # Visualizer for gaits before physical deployment
├── tools/ # Utility and calibration scripts
│ ├── calibrate_servos.py # Servo offset and range tuning
│ └── ServoNeutral.py # Script to hold servos at neutral position
├── tests/ # Module testing
│ └── Test_kinematics.py # Validation for IK models
├── run_robot.py # Main execution script
└── requirements.txt # Python package dependencies
Installation
- Clone the repository:
git clone [https://github.com/jenslajordmunk/autinydane.git](https://github.com/jenslajordmunk/autinydane.git) cd autinydane - Install the required Python dependencies (it is recommended to use a virtual environment):
pip install -r requirements.txtRun The robot
Remember to calibrate for the current assembly of the robot in ServoCalibration.py, then: Power on the Raspberry Pi system, connect the PS4 controller via Bluetooth, and execute the main loop:
python run_robot.py
Link to CAD Model:
License
This project is licensed under the terms of the MIT License. See the LICENSE file for details.